
【無人航空機操縦士】教則の確認
ドローン無人航空機操縦士の技能証明を受けるものは、航空機を飛行させるのに必要な法的知識が必要です。
安全な飛行ができるよう「無人航空機の飛行の安全に関する教則」令和5年4月13日第3版を読んでみることにします。
第12回は「電波について」です。
電波の特性
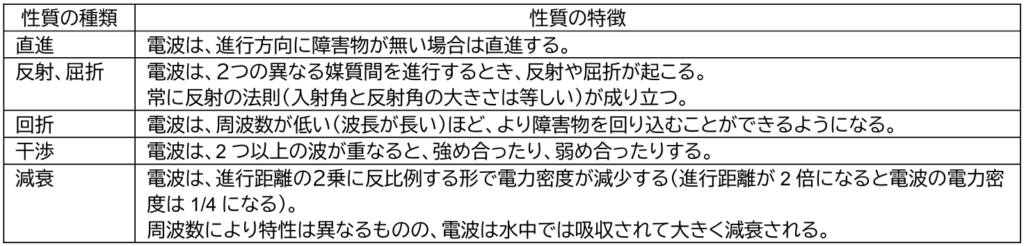
1) 直進、反射、屈折、回折、干渉、減衰
電波の性質の種類と特徴は以下のとおりである。
電波には障害物等の後ろに回り込む回折という性質、異なる媒質にぶつかると透過、反射あるいは屈折する性質、周波数の近い電波が重なると電波干渉が発生しお互いを減衰させる性質などがある。
2.4GHz の電波は回折しにくく直進性が高いため障害物の影響を受けやすくなる。
2) マルチパス
送信アンテナから放射された電波が山や建物などによる反射、屈折等により複数の経路を通って伝搬される現象をマルチパスという。
反射屈折した電波は、到達するまでにわずかな遅れを生じ、一時的に操縦不能になる要因の一つとなっている。
マルチパスによって電波が弱くなり一時的に操縦不能になった場合は送信機をできるだけ高い位置に持ちアンテナの向きを変えて操縦の復帰を試みる。
3) フレネルゾーン
フレネルゾーンとは無線通信などで、電力損失をすることなく電波が到達するために必要とする領域のことをいう。
無線通信での「見通しが良い」という表現は、フレネルゾーンがしっかり確保されている状態であることを意味する。
フレネルゾーンは、送信と受信のアンテナ間の最短距離を中心とした楕円体の空間で、この空間は無限に広がるが、電波伝搬で重要なのは第1フレネルゾーンと呼ばれる部分である。
このフレネルゾーン内に壁や建物などの障害物があると、受信電界強度が確保されず通信エラーが起こり、障害物がない状態に比べて通信距離が短くなる。
このフレネルゾーンの半径は周波数が高く(波長が短く)又はお互いの距離が短くなればなるほど小さくなる(2.4 GHz帯、5.7 GHz帯の場合、2地点が100m離れたケースでは2m以下)。
地面も障害物となるため、フレネルゾーンの半径を考慮してアンテナの高さを十分に確保する必要がある。
(2) 無⼈航空機の運航において使⽤されている電波の周波数帯・用途
無人航空機の運航において使用されている主な電波の周波数帯は、2.4GHz 帯、5.7GHz 帯、920MHz 帯、73MHz 帯、169MHz 帯である。
169MHz 帯は主に 2.4GHz帯及び 5.7GHz 帯の無人移動体画像伝送システムの無線局のバックアップ回線として使用される。
電波の周波数帯や出力、使用するアンテナの特性、変調方式、伝送速度などによって通信可能な距離は変動する。
(3) 無⼈航空機以外も含めた⽇本の電波の利⽤状況〔一等〕
電波の特性として、波長が長いほど直進性が弱く情報伝達容量が小さくなるが減衰はしにくい。
逆に波長が短いほど直進性が強く情報伝達容量が大きくなるが減衰はしやすい。
無人航空機の制御用通信に多く使用される極超短波は10cm~1mの波長(周波数 300MHz~3GHz)で、超短波(波長 1~10m、周波数 30~300MHz)に比べて直進性が更に強くなるが、多少の山や建物の陰には回り込んで伝わることができる。
伝送できる情報量が大きく、小型のアンテナと送受信設備で通信できることから、携帯電話や業務用無線、アマチュア無線、無人航空機など多種多様な移動通信システムを中心に、地上デジタルTV、空港監視レーダー、電子タグ、電子レンジ等幅広く利用される。
マイクロ波は1~10cmの波長(周波数3~30GHz)で、直進性が強い性質を持つため特定の方向に向けて発射するのに適している。
伝送できる情報量が非常に大きいことから、衛星通信、衛星放送や無人航空機の画像伝送、無線LANに利用される。レーダーもマイクロ波の直進性を活用したシステムで、気象レーダーや船舶用レーダー等に利用される。
(4) 電波の送信、受信に関わる基本的な技術
送信機のアンテナから発射される電波の強さは、方向により異なる(無指向性のアンテナの場合は、アンテナの周囲に対して同様に発射される)。
アンテナの角度は調整できるので、操縦時の送信機の持ち方や無人航空機の位置を考慮して最適なアンテナ角度を設定する必要がある。
磁気方位
(1) 地磁気センサの役割
地磁気センサにより、地球の磁気を検出することで機体の向き(方位)や姿勢を知ることができる。
地磁気センサは正常な方位を計測しない場合があるが、それは磁力線が示す北(磁北)と地図の北に偏角が生じるためである。
(2) 飛行環境において磁気に注意すべき構造物や環境
地磁気の検出には、鉄や電流が影響を与える。一般的に影響を与えるものは、高圧線や変電所、電波塔、鉄材を多く使用された建物、新幹線や電車の鉄道、自動車、鉄板など鉄材が多く埋め込まれた場所などがあげられる。機体の姿勢や進行方向に影響を与える場合がある。
(3) 無人航空機の磁気キャリブレーション
無人航空機の磁気キャリブレーションとは、飛行前にその場所の地磁気を検出して方位を取得し、GNSS機能やメインコントローラーに認識させることである。磁気キャリブレーションが正しく行われていないと、機体が操縦者の意図しない方向へ飛行する可能性がある。
飛行させる場所により、地磁気の方向は異なるので、磁気キャリブレーションを行うことが重要である。
GNSS
(1) GNSS
GPS(Global Positioning System)は、アメリカ国防総省が、航空機等の航法支援用として開発したシステムである。
GPSに加え、ロシアのGLONASS、欧州のGalileo、日本の準天頂衛星QZSS等を総称してGNSS(Global Navigation Satellite System/全球測位衛星システム)と言う。
GNSS は最低 4 個以上の人工衛星からの信号を同時に受信することでその位置を計算することができる。
機体に取り付けられた受信機により最低4基以上の人工衛星からの距離を同時に知ることにより、機体の位置を特定している。なお、安定飛行のためには、より多くの人工衛星から信号を受信することが望ましい。
(2) GNSSとRTKの精度
GPS測位での受信機1台の単独測位の精度は数十mの精度である。
測位方式として固定局と移動局の2つの受信機を使用する RTK(Real Time Kinematic)や DGPS(Differential GlobalPositioning System)などの技術が確立され、これらの測位方式は数cm~数mレベルの精度の高い測位が可能である。
(3) GNSSを使用した飛行における注意事項
自動操縦では手動操作よりも高精度な GNSS 測位が必要である。
自動操縦のためにあらかじめ地図上で設定したWay Point はGNSSの測位精度の影響を受けるため、精度が悪化した場合は実際
の飛行経路の誤差が大きくなる。
GNSS の測位精度に影響を及ぼすものとしては、GNSS 衛星の時計の精度、捕捉している GNSS衛星の数、障害物などによるマルチパス、受信環境のノイズなどが挙げられる。
受信機は、周囲の地形や障害物の状況を考慮して設置する必要がある。
一般的に位置精度は、水平方向に比べ高度方向の誤差が大きくなる。
ここまで、「無人航空機の飛行の安全に関する教則(令和5年4月13日第3版)」の中から抜粋して確認してみました。
個人の判断で色塗り・マーキングをしておりますので、公式ページから最新の教則を入手しご自身で確認を行うようお願いします。
「あさぬま行政書士事務所」はドローンの許認可申請代行をお受けします。いつでもご相談ください。
ドローンの許認可申請について詳しくはこちら
お気軽にお問い合わせください。090-5825-1789受付時間 9:00-17:00 要予約
(ご予約いただけば休日対応も可能)